Roboterraupe kommt überall hin
Sie ist für Orte gemacht, wo weder Menschen noch grössere „Artgenossen“ hinkommen: eine kleine Roboterraupe, die koreanische Forscher beinahe exakt ihrem natürlichen Vorbild nachgebaut haben. Das Hightechkerlchen kann etwa für Rettungs- oder Forschungsmissionen eingesetzt werden, um unzugängliche Orte abzuklären und leichter zugänglich zu machen.
Quelle: zvg
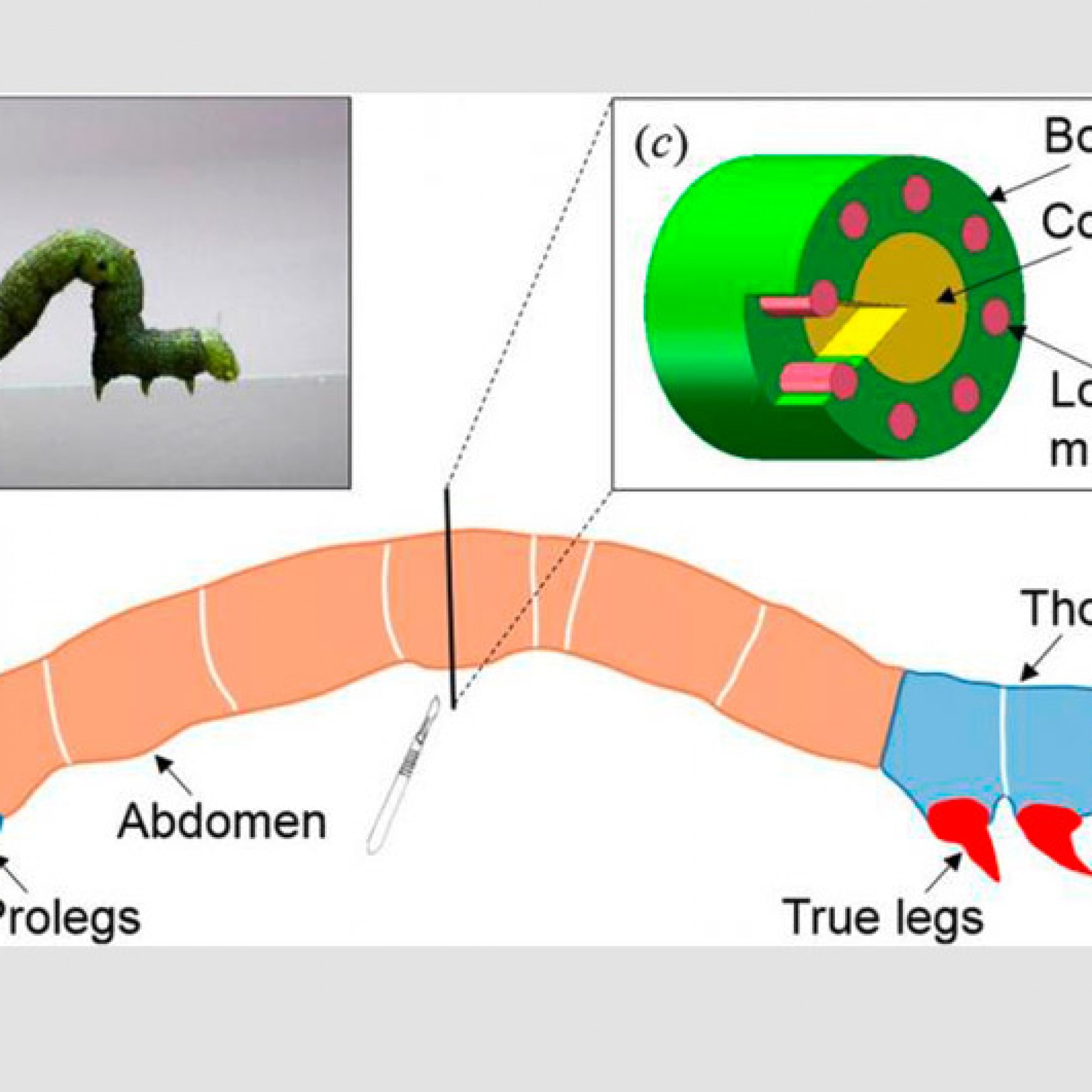
So funktioniert die Raupe.
Zwar ist die Art und Weise, wie sich eine Raupe fortbewegt nicht besonders schnell, dafür ist sie auf kleinräumigem unwirtlichem Terrain äusserst vorteilhaft. Darum haben Wissenschaftler von der Seoul National University den kleinen Helfer der Natur nachempfunden. Es besteht aus flexiblem Silikonmaterial: Zuerst wurden die „Körperteile“ der Roboterraupe mittels Computer entworfen, danach wurden sie mittels Gussformen hergestellt. Als Beine dienen am Vorder- und Hinterteil angebrachte Polyamidstreifen.
Das Konzipieren des kleinen Roboters dürfte schwierig gewesen sein: Denn das Muskelsystem echter Raupen ist komplex, die kleinen Lebewesen können eine ganze Reihe extremer Körperbewegungen ausführen. So können sie beispielsweise vollständig aufgerichtet stehen, während sie sich nur mit den hinteren Beinchen abstützen, den sogenannten „Bauchfüssen“. Deshalb haben die Forscher besondere SMA-Kabel verwendet, um das Muskelsystem nachzubilden. Diese Vernetzung ermöglicht die komplexen Bewegungsabläufe. Weil sich die Hightech-Raupe wie ihr echtes Vorbild mittels „Push Pull“-Ablauf fortbewegt, mussten vor allem die Beine des Systems äusserst exakt aufeinander abgestimmt werden.
Trotz seines aufwendigen Aufbaus misst der Raupen-Robotor gerade mal 54 Millimeter. Dennoch kommt das künstliche Tierchen auf eine Geschwindigkeit von 3,6 Millimeter pro Sekunde. Als noch komplizierter als der Aufbau erwies sich die Lenkung, weil das Tempo für eine 90-Grad-Drehung stark gedrosselt werden muss. Dennoch ist die Entwicklung solch vielschichtiger Bewegungsabläufe ein enormer Fortschritt im Vergleich zu bereits bestehenden Konstruktionen. – Als nächstes wollen die Forscher nun die Mobilität des Helferchens verbessern und ein unabhängiges Kontrollsystem zu entwickeln. (mai)